Local Surface-Wave Tomography in Cartesian Coordinates
Surface-wave tomography commonly relies on the assumption that surface waves propagate along the great-circle path connecting two points on the Earth’s surface. This assumption is motivated by the observation that, at the considered frequency, lateral variations in surface-wave velocity are relatively minor, thus resulting in only slight ray bending. By discretizing the Earth’s surface into \(N\) blocks, each of constant slowness \(s\), and assuming negligible ray bending, the forward equation for the travel time between two points can be expressed as \(t = \sum_n^N s_n l_n\), where \(l\) denotes the length of the great circle crossing the \(n\)th block.
In this tutorial, we consider a local-scale domain: a region only two degrees wide in longitude and latitude, centred on the equator. Over such short distances the Earth’s curvature is negligible, and a great circle deviates imperceptibly from the straight line connecting source and receiver in the longitude-latitude plane. We can therefore treat longitude and latitude as Cartesian coordinates, and tackle the tomographic problem through a trans-dimensional discretization of the model domain, via the 2-D Voronoi tessellation provided by bayesbay.discretization.Voronoi2D. At larger scales, where the planar approximation breaks down, the sphericity of the problem must be honoured explicitly, as illustrated in Continental Surface-Wave Tomography in Spherical Coordinates and Global Surface-Wave Tomography in Spherical Coordinates.
Import libraries and define constants
In this tutorial, we make use of the SeisLib Python library; first to generate a synthetic velocity model and then in the forward calculation of surface-wave arrival times.
import numpy as np
import matplotlib.pyplot as plt
import scipy
from seislib.tomography import SeismicTomography
from cmcrameri import cm as scm
from bayesbay.discretization import Voronoi2D
from bayesbay.prior import UniformPrior
import bayesbay as bb
np.random.seed(10)
True velocity model
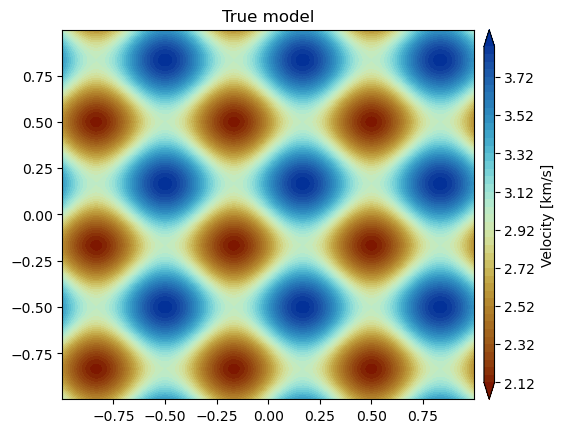
Using SeisLib, the following block defines a velocity model characterized by a checkerboard pattern, which we will attempt to retrieve through Bayesian inversion.
tomo = SeismicTomography(
cell_size=0.005,
lonmin=-1,
lonmax=1,
latmin=-1,
latmax=1,
regular_grid=True
)
grid_points = np.column_stack(tomo.grid.midpoints_lon_lat())
vel_true = tomo.checkerboard(
ref_value=3,
kx=3,
ky=3,
lonmin=tomo.grid.lonmin,
lonmax=tomo.grid.lonmax,
latmin=tomo.grid.latmin,
latmax=tomo.grid.latmax,
anom_amp=0.3
)(*grid_points.T)
-------------------------------------
GRID PARAMETERS
Lonmin - Lonmax : -1.000 - 1.000
Latmin - Latmax : -1.000 - 1.000
Number of cells : 160000
Grid cells of 0.005° : 160000
-------------------------------------
fig, ax = plt.subplots()
img = ax.tricontourf(*grid_points.T,
vel_true,
levels=50,
cmap=scm.roma,
vmin=vel_true.min(),
vmax=vel_true.max(),
extend='both')
ax.set_xlim(grid_points[:,0].min(), grid_points[:,0].max())
ax.set_ylim(grid_points[:,1].min(), grid_points[:,1].max())
cbar = fig.colorbar(img, ax=ax, aspect=35, pad=0.02)
cbar.set_label('Velocity [km/s]')
ax.set_title('True model')
plt.show()
Observed Data
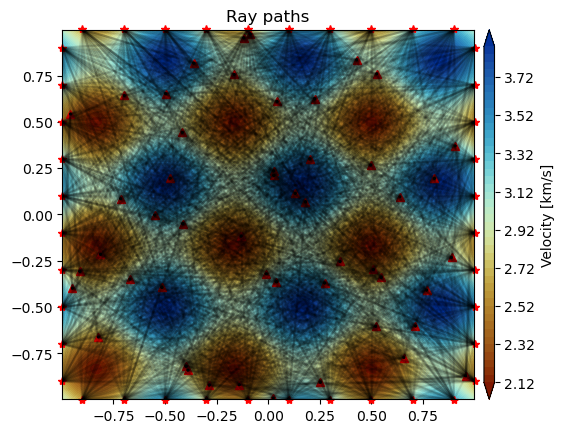
The code block below generates coordinates for seismic sources and receivers, positioning 40 sources along the boundary of the previously defined velocity-model region and 50 receivers randomly within it. Utilizing SeisLib, we then compute the \(m \times n\) Jacobian matrix \(\mathbf{G}\), where \(m\) denotes the number of source-receiver pairs (here, 2000) and \(n\) the number of grid cells defining the velocity medium (here, 160,000). \(\mathbf{G}\) is defined such that \(G_{ij} = \frac{l_j}{L_i}\), where \(L_i\) is the great-circle length associated with the \(i\)th observation and \(l_j\) is its segment within the \(j\)th grid cell (Magrini et al. 2022).
In the code block below, we use the Jacobian matrix to define the observed surface-wave arrival times \(\mathbf{d}_{obs} = \mathbf{G} \cdot \mathbf{s}_{true}\), where \(\mathbf{s}_{true}\) denotes the reciprocal of the true velocity model (i.e., the true medium’s slowness) and each entry of \(\mathbf{d}_{obs}\) corresponds to a measurement of average inter-station slowness. Given our assumption that ray bending due to lateral heterogeneities is negligibile, \(\mathbf{G}\) is independent of the velocity structure, and will be used throughout the MCMC sampling to compute data predictions \(\mathbf{d}_{pred} = \mathbf{G} \cdot \mathbf{s}\), associated with a proposed slowness model \(\mathbf{s}\).
def get_sources_and_receivers(n_sources_per_side=10, n_receivers=50):
ns = n_sources_per_side
dx = (tomo.grid.lonmax - tomo.grid.lonmin) / ns
dy = (tomo.grid.latmax - tomo.grid.latmin) / ns
sources_x = list(np.arange(tomo.grid.lonmin + dx/2, tomo.grid.lonmax, dx))
sources_y = list(np.arange(tomo.grid.latmin + dy/2, tomo.grid.lonmax, dy))
sources = np.column_stack((
[tomo.grid.latmin]*ns + sources_y + [tomo.grid.latmax]*ns + sources_y,
sources_x + [tomo.grid.lonmax]*ns + sources_x + [tomo.grid.lonmin]*ns
))
receivers = np.random.uniform(
[tomo.grid.latmin, tomo.grid.lonmin],
[tomo.grid.latmax, tomo.grid.lonmax],
(n_receivers, 2)
)
return sources, receivers
def add_data_coords(tomo, sources, receivers):
data_coords = np.zeros((sources.shape[0] * receivers.shape[0], 4))
for icoord, (isource, ireceiver) in enumerate(
np.ndindex((sources.shape[0], receivers.shape[0]))
):
data_coords[icoord] = np.concatenate(
(sources[isource], receivers[ireceiver])
)
tomo.data_coords = data_coords
def compute_jacobian(tomo):
tomo.compile_coefficients()
jacobian = scipy.sparse.csr_matrix(tomo.A)
del tomo.A
return jacobian
sources, receivers = get_sources_and_receivers(n_sources_per_side=10,
n_receivers=50)
add_data_coords(tomo, sources, receivers)
jacobian = compute_jacobian(tomo)
d_obs = jacobian @ (1/vel_true)
fig, ax = plt.subplots()
img = ax.tricontourf(*grid_points.T,
vel_true,
levels=50,
cmap=scm.roma,
vmin=vel_true.min(),
vmax=vel_true.max(),
extend='both')
# Sources and receivers cols are lat, lon
ax.plot(sources[:,1], sources[:,0], 'r*', clip_on=False)
ax.plot(receivers[:,1], receivers[:,0], 'r^')
for lat1, lon1, lat2, lon2 in tomo.data_coords:
ax.plot([lon1, lon2], [lat1, lat2], 'k', alpha=0.1)
ax.set_xlim(grid_points[:,0].min(), grid_points[:,0].max())
ax.set_ylim(grid_points[:,1].min(), grid_points[:,1].max())
cbar = fig.colorbar(img, ax=ax, aspect=35, pad=0.02)
cbar.set_label('Velocity [km/s]')
ax.set_title('Ray paths')
plt.show()
Inference parameterization
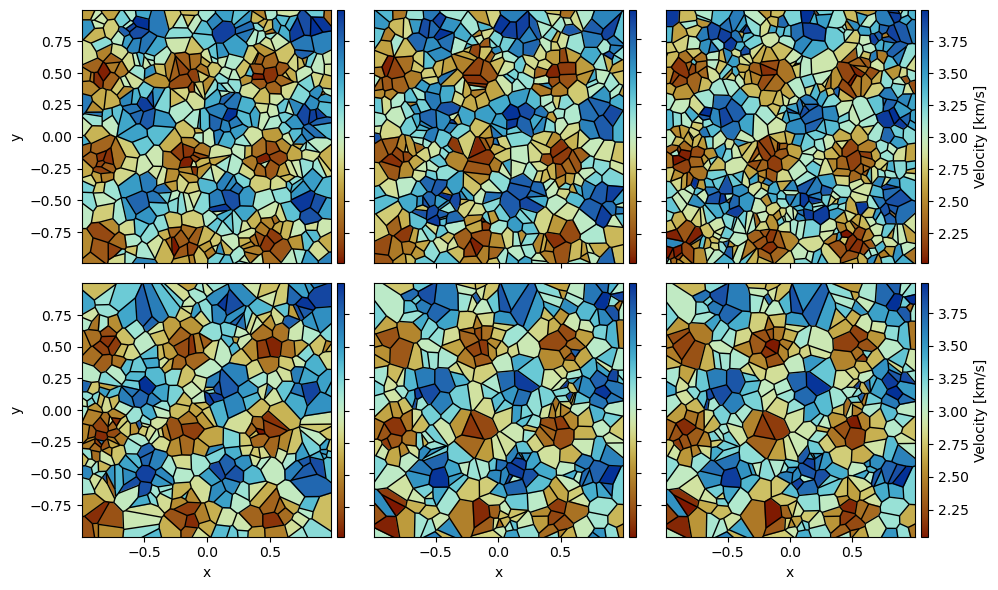
We parameterize the velocity model through a trans-dimensional Voronoi tessellation, whose number of cells is a free parameter of the inversion, allowed to vary between 50 and 1500. Within each Voronoi cell, the velocity is uniformly distributed a priori between 2 and 4 km/s. Note that we register the spatial grid defined earlier through interpolation_positions: at each step of the Markov chains, BayesBay keeps track of the Voronoi cell each grid point belongs to, which is used in the forward calculation below.
vel = UniformPrior('vel', vmin=2, vmax=4, perturb_std=0.1)
voronoi = Voronoi2D(
name='voronoi',
vmin=[tomo.grid.lonmin, tomo.grid.latmin],
vmax=[tomo.grid.lonmax, tomo.grid.latmax],
perturb_std=0.05,
n_dimensions_min=50,
n_dimensions_max=1500,
parameters=[vel],
interpolation_positions=grid_points)
parameterization = bb.parameterization.Parameterization(voronoi)
Log Likelihood
In the forward function, the velocity model is interpolated onto the grid through get_interpolated_values, which reads, from the cache of the current Markov chain state, the nearest-neighbour assignments of the grid points to the Voronoi cells; these are updated by BayesBay at every perturbation of the tessellation. The interpolated velocity is translated into surface-wave arrival times through the Jacobian matrix. (For an explanation of how the interpolation works under the hood, see Continental Surface-Wave Tomography in Spherical Coordinates.)
def forward(state):
voronoi_state = state["voronoi"]
interp_vel = voronoi.get_interpolated_values(voronoi_state, "vel")
state.save_to_extra_storage("interp_vel", interp_vel)
return jacobian @ (1 / interp_vel)
target = bb.likelihood.Target('d_obs',
d_obs,
std_min=0,
std_max=0.01,
std_perturb_std=0.001,
noise_is_correlated=False)
log_likelihood = bb.likelihood.LogLikelihood(targets=target, fwd_functions=forward)
Bayesian Inference
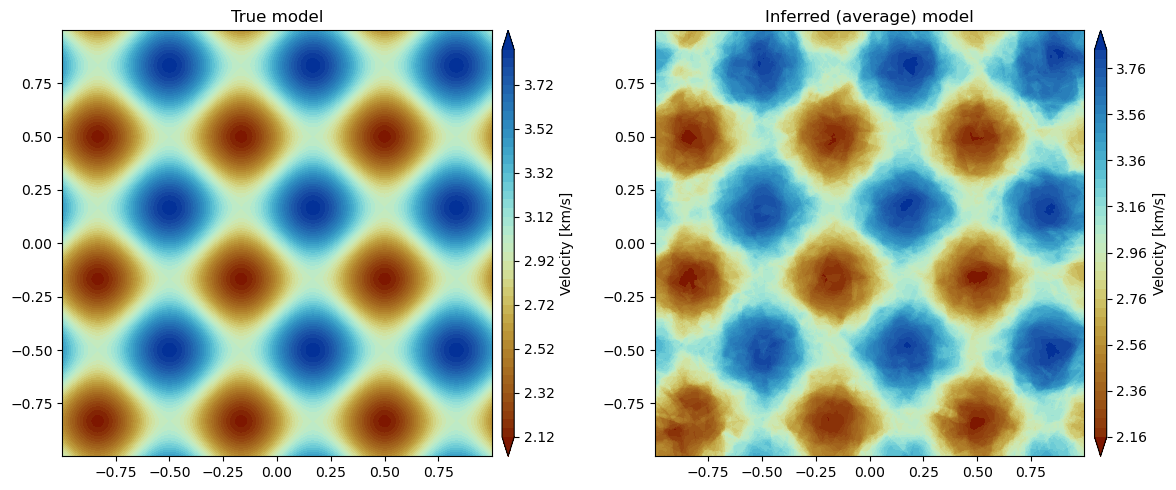
We sample the posterior through multiple Markov chains run in parallel, discarding the initial burn-in iterations and saving one model every save_every iterations thereafter. The saved states include, for each sampled model, the Voronoi-site positions, the associated velocities, and the velocity field interpolated onto the grid (stored in the forward function via save_to_extra_storage).
inversion = bb.BayesianInversion(
parameterization=parameterization,
log_likelihood=log_likelihood,
n_chains=20
)
inversion.run(
sampler=None,
n_iterations=30_000,
burnin_iterations=15_000,
save_every=250,
verbose=False,
print_every=25_000
)
results = inversion.get_results()
inferred_vel = np.mean(results['interp_vel'], axis=0)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
img = ax1.tricontourf(*grid_points.T,
vel_true,
levels=50,
cmap=scm.roma,
vmin=vel_true.min(),
vmax=vel_true.max(),
extend='both')
ax1.set_xlim(grid_points[:,0].min(), grid_points[:,0].max())
ax1.set_ylim(grid_points[:,1].min(), grid_points[:,1].max())
cbar = fig.colorbar(img, ax=ax1, aspect=35, pad=0.02)
cbar.set_label('Velocity [km/s]')
ax1.set_title('True model')
img = ax2.tricontourf(*grid_points.T,
inferred_vel,
levels=50,
cmap=scm.roma,
vmin=vel_true.min(),
vmax=vel_true.max(),
extend='both')
ax2.set_xlim(grid_points[:,0].min(), grid_points[:,0].max())
ax2.set_ylim(grid_points[:,1].min(), grid_points[:,1].max())
cbar = fig.colorbar(img, ax=ax2, aspect=35, pad=0.02)
ax2.set_title('Inferred (average) model')
cbar.set_label('Velocity [km/s]')
plt.tight_layout()
plt.show()
fig, axes = plt.subplots(2, 3, figsize=(10, 6))
random_indexes = np.random.choice(range(len(results['voronoi.vel'])), size=9, replace=False)
for ipanel, (ax, irandom) in enumerate(zip(axes.ravel(), random_indexes)):
voronoi_sites = results['voronoi.discretization'][irandom]
velocity = results['voronoi.vel'][irandom]
ax, cbar = Voronoi2D.plot_tessellation(
voronoi_sites,
velocity,
ax=ax,
cmap=scm.roma
)
ax.tick_params(labelleft=False, labelbottom=False)
ax.set_xlabel('')
ax.set_ylabel('')
cbar.set_label('Velocity [km/s]')
if ipanel in [0, 3]:
ax.tick_params(labelleft=True)
ax.set_ylabel('y')
if ipanel not in [2, 5]:
cbar.set_ticklabels('')
cbar.set_label('')
if ipanel>2:
ax.set_xlabel('x')
ax.tick_params(labelbottom=True)
plt.tight_layout()
plt.show()
References
[1] Magrini et al. (2022), Surface-wave tomography using SeisLib: a Python package for multiscale seismic imaging. Geophysical Journal International